Abstract
This project explores the innovative integration of virtual reality (VR) technology with a dexterous robot arm-hand system, aiming to revolutionize teleoperation in environments that pose significant risks to human operators. By leveraging the immersive and intuitive control capabilities offered by VR headsets, the system provides users with a highly responsive and naturalistic interface for manipulating robotic appendages in real-time. This groundbreaking approach holds the potential to significantly enhance operational precision and safety in critical scenarios, including biological experiments with hazardous materials and maintenance tasks in nuclear facilities. Through the advanced simulation of tactile feedback and precise movement replication, the project aims to overcome traditional barriers in remote operation, thereby expanding the horizons of human-robot interaction. This technology not only promises to protect human health by minimizing exposure to dangerous conditions but also sets a new standard for efficiency and accuracy in complex manipulative tasks in challenging work environments.
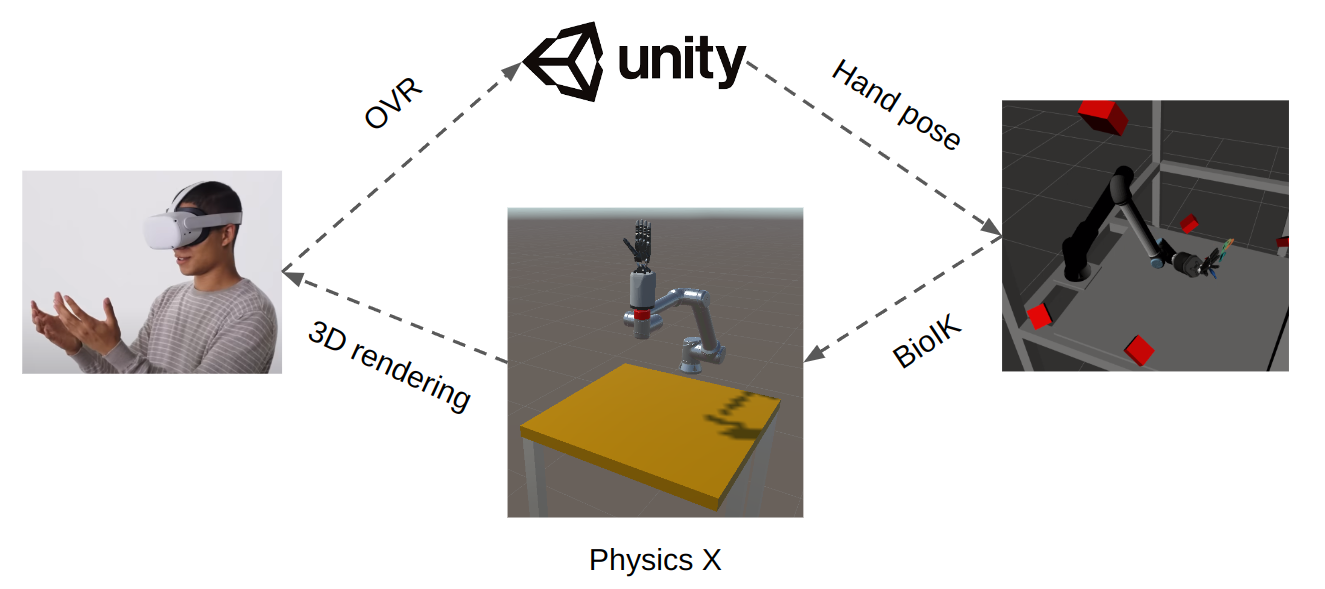
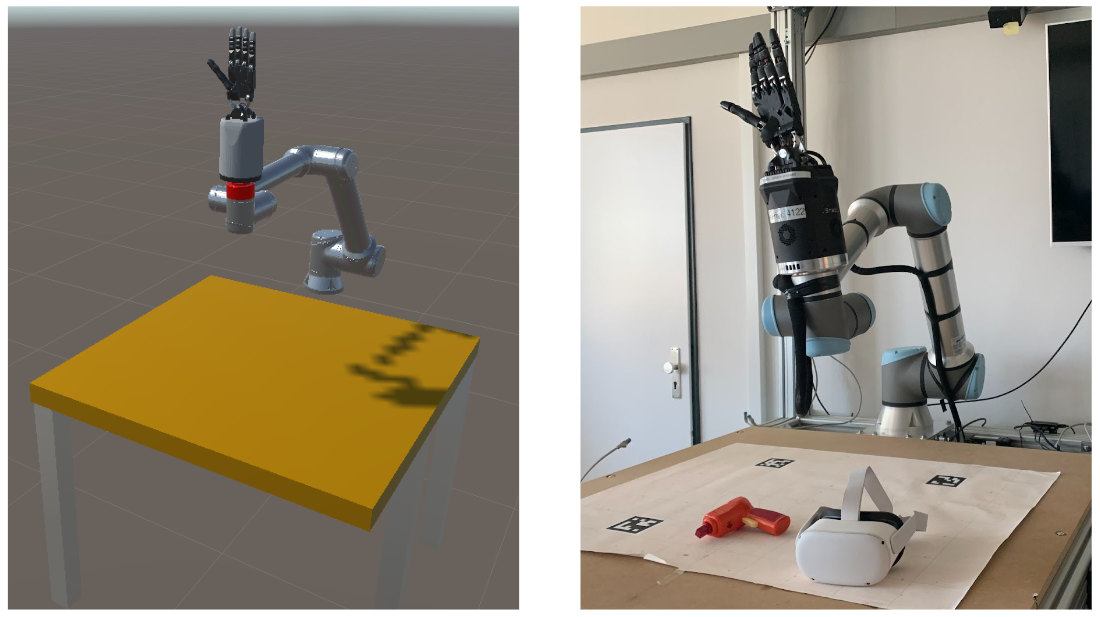
For the first step, building the simulation environment for the real arm-hand system in Unity:
Unity is used for VR development and user interface design, while employing ROS for communication with the robot system. The entire framework is structured as follows: