Driven by a profound interest in robotics, this project culminates in the creation of a miniature version of the Spot robot, famously developed by Boston Dynamics. This endeavor encompasses a broad spectrum of engineering disciplines, including the simulation of the robot's dynamics within a physics engine, the meticulous design of its circuit board, and the development of a sophisticated control system. A significant portion of the project was dedicated to the 3D printing of all the robot's body parts, ensuring both functionality and aesthetic fidelity to its full-sized counterpart. The culmination of this project is the integration of a joystick control interface, allowing for intuitive and precise manipulation of the robot's movements.
The project incorporates walking control mechanisms within a simulation environment, facilitated through the use of a joystick. PyBullet has been selected for its robust capabilities in simulating realistic movements and interactions. This choice ensures that the simulated dynamics closely mimic real-world physics, offering an authentic experience in controlling the robot's locomotion.
This video provides a detailed overview of the 3D printing process used to create the body parts of the robot.
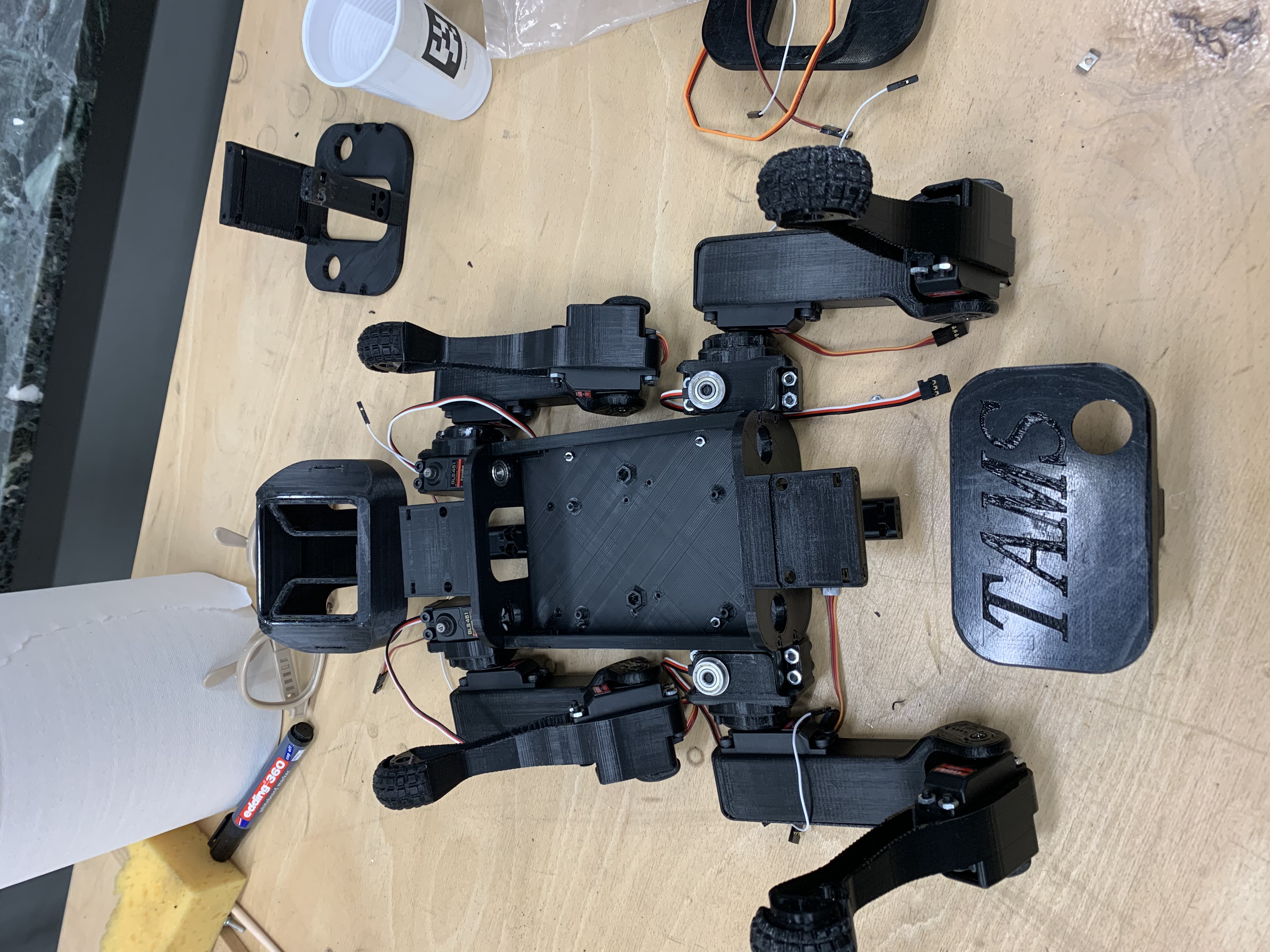
This image provides an overview of all the components that have been meticulously 3D printed for the project.
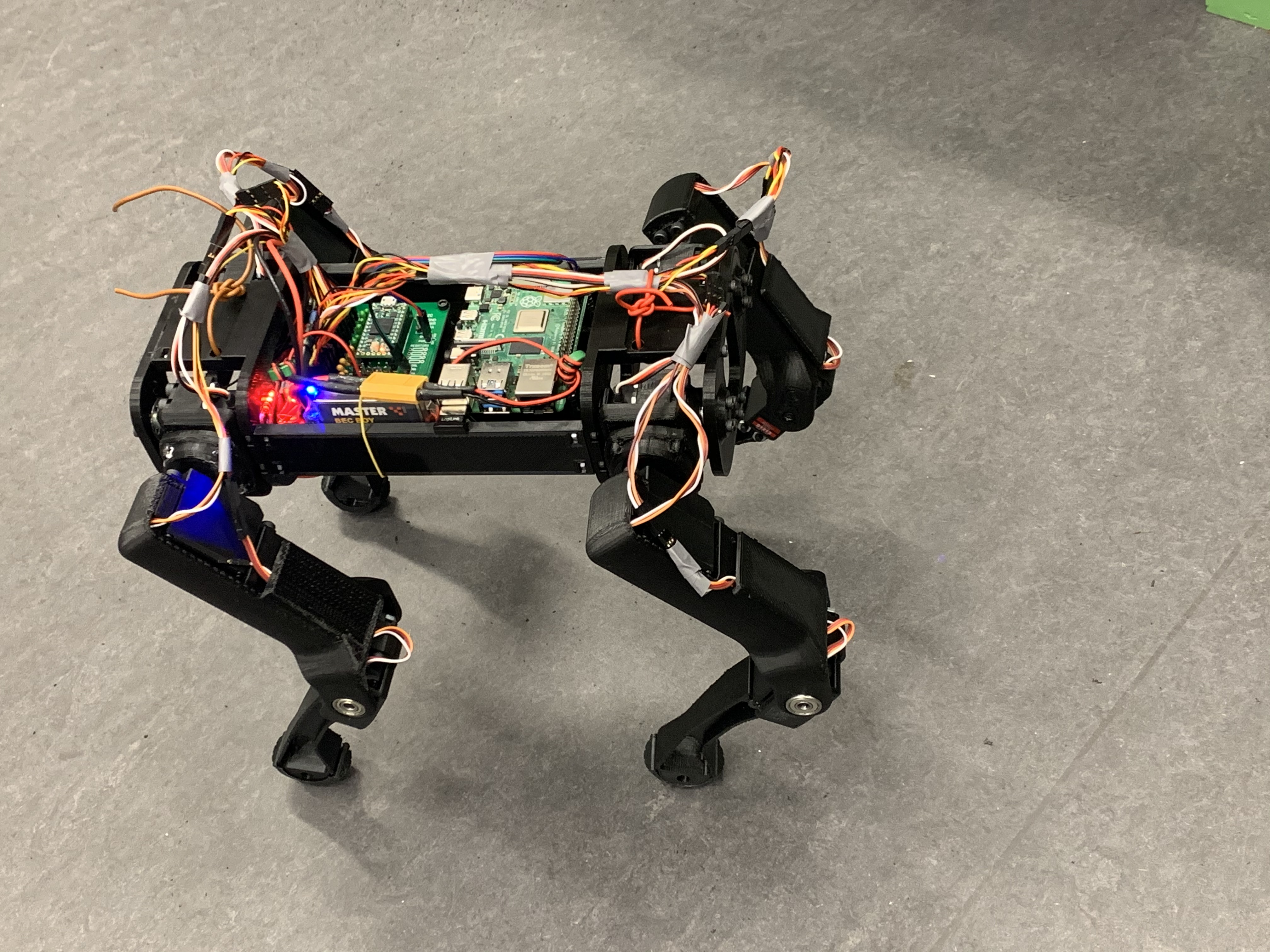
The real robot walks on the ground, guided by control signals from the joystick. However, due to the motor's insufficient strength, the robot's walking capability does not match its performance in the simulation.
@INPROCEEDINGS{author={Cong, Lin},
booktitle={github},
title={Spot-mini inspired quadrupedal robot design and remot control system},
year={2021},}